Batch Normalization详解
2023-11-25发布于深度学习 | 最后更新于2023-12-04 16:12:00
标准化的基本步骤
1. 计算统计量——均值与方差
假设数据为\(X=\{x_1, x_2, \dots,x_N\}\),则均值\(\mathrm{E}(X)\)与方差\(\mathrm{Var}(X)\)分别为:
2. 进行标准化
使用下式对\(x_i\)进行标准化:
其中\(\epsilon\)为一个很小的正实数,用于避免计算中出现分母为零的情况
3. 放缩与平移
得到上面的\(\hat{x_i}\)后,还会进行放缩与平移:
其中的\(\gamma, \beta\)均为实数,并且是可以训练的。
Batch Normalization
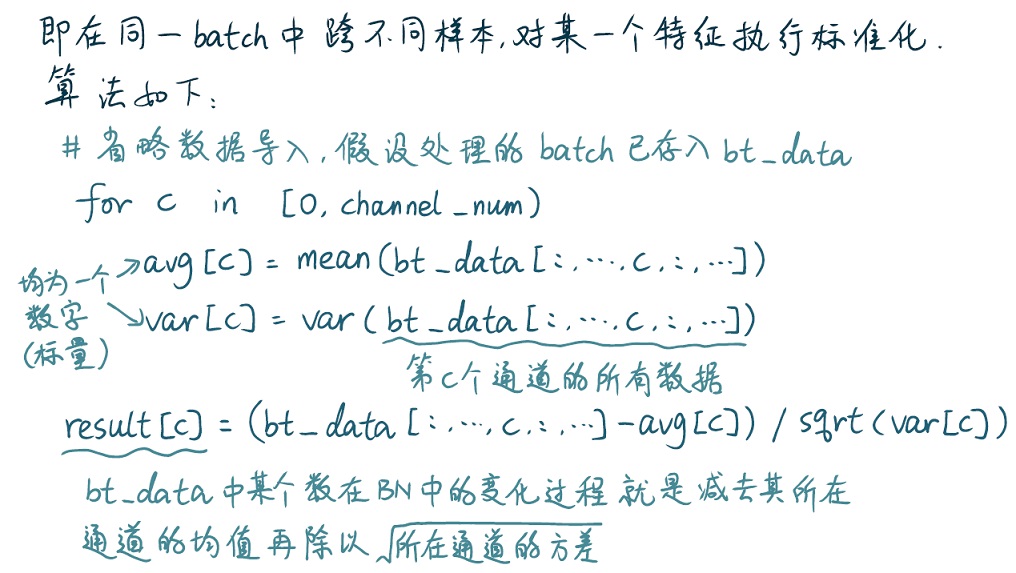
在一个batch中,跨各个特征向量对每个channel各自进行标准化。以下是torch.nn模块中各种BN层的详解。
torch.nn.BatchNorm1d
顾名思义,对一维的的特征向量进行Batch Normalization。输入可以是2D或者3D的,会将输入数据的大小视为\((N,C)\)或\((N,C,L)\),\(N\)为一个batch中的特征向量数量,\(C\)为通道数,\(L\)为序列长度。需要记住的是,BN永远是对各通道进行计算的,可以结合例子进行理解:
例子1
假设某batch的数据如下,size为\((3, 4)\),第1维(即每一行)表示单词的词向量,此batch中共有三个单词,通道数为4:
[[1, 3, 2, 4],
[2, 2, 1, 1],
[6, 2, 4, 1]]
分别计算四个通道的均值与方差:
根据标准化公式\(\hat{x_i}=\frac{x_i-\mathrm{E}(X)}{\sqrt{\mathrm{Var}(X)+\epsilon}}\)计算即可,此处省略\(\epsilon\)进行验证:
data_np = np.array([[1, 3, 2, 4],
[2, 2, 1, 1],
[6, 2, 4, 1]], dtype=np.float32)
data_torch = torch.from_numpy(data_np)
bn1 = torch.nn.BatchNorm1d(4, track_running_stats=False, affine=False)
avg = np.average(data_np, axis=0)
var = np.var(data_np, axis=0)
(data_np-avg)/np.sqrt(var)
array([[-0.9258, 1.4142, -0.2673, 1.4142],
[-0.4629, -0.7071, -1.069 , -0.7071],
[ 1.3887, -0.7071, 1.3363, -0.7071]])
bn1(data_torch)
tensor([[-0.9258, 1.4142, -0.2673, 1.4142],
[-0.4629, -0.7071, -1.0690, -0.7071],
[ 1.3887, -0.7071, 1.3363, -0.7071]], dtype=torch.float64)
在创建BatchNorm1d层时,指定了三个参数:
- 第一个参数是
num_features,即通道数\(C\) track_running_stats决定了模型中此BatchNorm1d层会不会在不同batch之间跟踪均值和方差,若启用,则模型在训练时会有running_mean和running_var用于保存全局的均值和方差。affine决定了是否进行基本步骤中的第三步——放缩与平移
例子2
假设某batch的数据如下,size为\((3, 2, 2)\),第1维(即每一行)是表示一个句子的向量,此batch中:
- 共有三个句子,例如第一个句子为
[[1, 3], [2, 4]] - 通道数为2:对于一个句子来说,其中的一个词就是该句子的一个特征分量,例如第一个句子的第一个通道(词)为
[1, 3] - 序列长度为2:词向量是2维的
[[[1, 3], [2, 4]],
[[2, 2], [1, 1]],
[[6, 2], [4, 1]]]
分别计算两个通道的均值和方差,第一个通道的数据为1, 3, 2, 2, 6, 2,第二个通道的数据为2, 4, 1, 1, 4, 1
验证如下(主要看结果,numpy的过程用了些小技巧)
data_np = np.array([[[1, 3], [2, 4]],
[[2, 2], [1, 1]],
[[6, 2], [4, 1]]], dtype=np.float32)
data_torch = torch.from_numpy(data_np)
bn1 = torch.nn.BatchNorm1d(2, track_running_stats=False, affine=False)
avg = np.array([data_np[:,0,:].mean(), data_np[:,1,:].mean()])
avg = np.tile(avg.repeat(2), 3).reshape((3, 2, 2))
var = np.array([data_np[:,0,:].var(), data_np[:,1,:].var()])
var = np.tile(var.repeat(2), 3).reshape((3, 2, 2))
(data_np-avg)/np.sqrt(var)
array([[[-1.0426, 0.2085],
[-0.124 , 1.3644]],
[[-0.417 , -0.417 ],
[-0.8682, -0.8682]],
[[ 2.0851, -0.417 ],
[ 1.3644, -0.8682]]], dtype=float32)
bn1(data_torch)
tensor([[[-1.0426, 0.2085],
[-0.1240, 1.3644]],
[[-0.4170, -0.4170],
[-0.8682, -0.8682]],
[[ 2.0851, -0.4170],
[ 1.3644, -0.8682]]])
torch.nn.BatchNorm2d
输入为4维tensor,大小为\((N,C,H,W)\),\(N\)为一个batch中特征向量的数量,\(C\)为一个特征向量的分量数,特征向量一个分量的大小则为\((H,W)\)。可以从图片的角度来理解:N为一个batch中图片的张数,C为图片的R、G、B三个通道,H、W则为图片的高和宽。
测试数据如下,注释中说明了理解方式
[
[
[[3, 4],
[1, 2]], # 第一张图片的一通道
[[3, 3],
[1, 2]], # 第一张图片的二通道
[[4, 1],
[4, 1]], # 第一张图片的三通道
], #batch中的第一张图片
[
[[2, 2],
[1, 4]],
[[3, 3],
[1, 4]],
[[2, 1],
[2, 3]],
], #batch中的第二张图片
[
[[4, 2],
[4, 1]],
[[1, 1],
[2, 1]],
[[3, 2],
[2, 4]],
], #batch中的第三张图片
]
3, 4, 1, 2, 2, 2, 1, 4, 4, 2, 4, 1;以此类推
# 限于篇幅,略去数据初始化部分,np.array与tensor分别存于data_np与data_torch中
avg = []
var = []
for i in range(data_np.shape[1]):
avg.append(data_np[:,i,:,:].mean())
var.append(data_np[:,i,:,:].var())
avg = np.array(avg)
avg = np.tile(avg, 3).repeat(4).reshape((3, 3, 2, 2))
var = np.array(var)
var = np.tile(var, 3).repeat(4).reshape((3, 3, 2, 2))
bn2 = torch.nn.BatchNorm2d(3, track_running_stats=False, affine=False)
(data_np-avg)/np.sqrt(var)
array([[[[ 0.4201, 1.2603],
[-1.2603, -0.4201]],
[[ 0.8835, 0.8835],
[-1.0442, -0.0803]],
[[ 1.4201, -1.2706],
[ 1.4201, -1.2706]]],
...
[[[ 1.2603, -0.4201],
[ 1.2603, -1.2603]],
[[-1.0442, -1.0442],
[-0.0803, -1.0442]],
[[ 0.5232, -0.3737],
[-0.3737, 1.4201]]]], dtype=float32)
bn2(data_torch)
tensor([[[[ 0.4201, 1.2602],
[-1.2602, -0.4201]],
[[ 0.8835, 0.8835],
[-1.0442, -0.0803]],
[[ 1.4201, -1.2706],
[ 1.4201, -1.2706]]],
...
[[[ 1.2602, -0.4201],
[ 1.2602, -1.2602]],
[[-1.0442, -1.0442],
[-0.0803, -1.0442]],
[[ 0.5232, -0.3737],
[-0.3737, 1.4201]]]])
torch.nn.BatchNorm3d
输入的是5维tensor,大小会被视为\((N,C,D,H,W)\),即一个channel中就包含了多张单色图。限于篇幅,下面只写出用numpy手工计算BN的过程
var = []
avg = []
for i in range(data_np.shape[1]):
var.append(data_np[:,i,:,:,:].var())
avg.append(data_np[:,i,:,:,:].mean())
var = np.array(var)
avg = np.array(avg)
avg = np.tile(avg, 2).repeat(32).reshape((2, 3, 2, 4, 4))
var = np.tile(var, 2).repeat(32).reshape((2, 3, 2, 4, 4))
res_np = (data_np-avg)/np.sqrt(var)
总结
至此,已经可以很清晰的看出Batch Normalization的通用算法了,大致分为下面几步:
- 计算各通道的均值和方差,有几个通道就有几个均值、几个方差
- 输入数据中的某一个数进行BN后的结果,其实就是先减去这个数所在通道的均值,再除以所在通道方差的平方根