Instance Normalization详解
2023-12-21发布于深度学习 | 最后更新于2023-12-22 13:12:00
Instance Normalization
重新回忆一下标准化的公式:
各种不同标准化方法的区别基本上仅在于统计量的计算范围。Instance Normalization会对每一个样本的每一个通道都计算一个统计量,最后得到的统计量个数就是 \(N\times C\) ,即样本数乘以通道数。
Instance Normalization和Batch Normalization一样,在pytorch中做了1d、2d和3d的区分,对应的类以及给入数据的size如下表:
| 类别 | 大小 |
|---|---|
torch.nn.InstanceNorm1d |
\((C,L)\) 、 \((N,C,L)\) |
torch.nn.InstanceNorm2d |
\((C,H,W)\) 、 \((N,C,H,W)\) |
torch.nn.InstanceNorm1d |
\((C,D,H,W)\) 、 \((N,C,D,H,W)\) |
InstanceNorm1d
InstanceNorm1d的输入大小有两种取法: \((C,L)\) 、 \((N,C,L)\) ,其中 \(N\) 表示样本的个数、 \(C\) 表示通道数、 \(L\) 表示通道的长度。
在计算均值、方差这两个统计量时,范围是各个样本的各个通道。也就是说,对于输入大小 \((C,L)\) 、 \((N,C,L)\) ,计算出的统计量个数分别为 \(C\) 、 \(N\times C\)
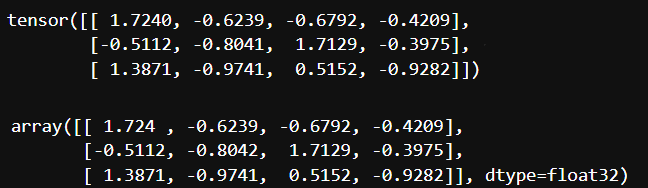
验证如下:
C, L = (3, 4)
data_np = np.random.randn(C, L).astype(np.float32)
data_torch = torch.from_numpy(data_np)
instance_norm1d = torch.nn.InstanceNorm1d(C, affine=False, track_running_stats=False)
instance_norm1d(data_torch)
avg = []
var = []
for channel in range(C):
avg.append(data_np[channel,:].mean())
var.append(data_np[channel,:].var())
avg = np.array(avg)
var = np.array(var)
avg = avg.repeat(L).reshape((C, L))
var = var.repeat(L).reshape((C, L))
(data_np - avg) / np.sqrt(var)
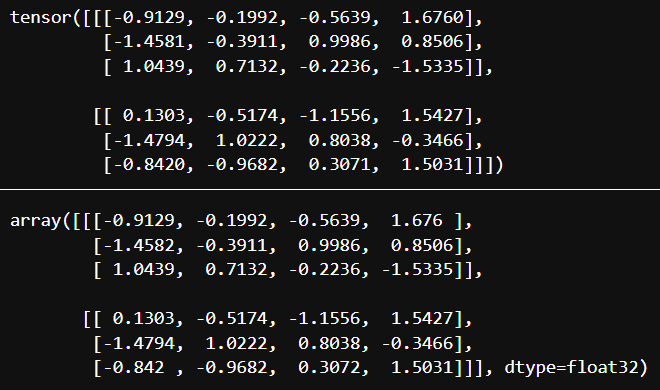
N, C, L = (2, 3, 4)
data_np = np.random.randn(N, C, L).astype(np.float32)
data_torch = torch.from_numpy(data_np)
instance_norm1d = torch.nn.InstanceNorm1d(C, affine=False, track_running_stats=False)
instance_norm1d(data_torch)
avg = []
var = []
for sample in range(N):
for channel in range(C):
avg.append(data_np[sample,channel,:].mean())
var.append(data_np[sample,channel,:].var())
avg = np.array(avg)
var = np.array(var)
avg = avg.repeat(L).reshape((N, C, L))
var = var.repeat(L).reshape((N, C, L))
(data_np - avg) / np.sqrt(var)
InstanceNorm2d
InstanceNorm2d的输入大小有两种取法: \((C,H,W)\) 、 \((N,C,H,W)\) ,其中 \(N\) 和 \(C\) 的含义不变、 \(H\) 表示一个通道的高、 \(W\) 表示一个通道的宽。显然此时一个通道的大小就是 \(H\times W\) ,即要对每 \(H\times W\) 个数值求出一个统计量,算出的统计量个数对于 \((C,H,W)\) 和 \((N,C,H,W)\) 分别为 \(C\) 、 \(N\times C\)
事实上, \((C,H,W)\) 其实是只输入一个样本的情况,和输入N个样本其实没有什么区别。
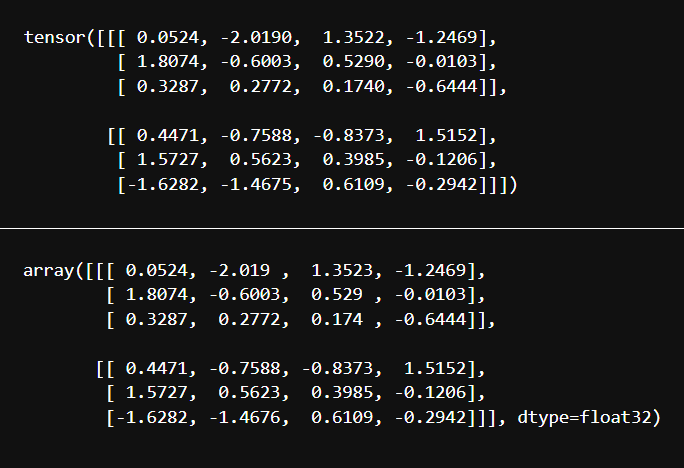
验证如下:
C, H, W = (2, 3, 4)
data_np = np.random.randn(C, H, W).astype(np.float32)
data_torch = torch.from_numpy(data_np)
instance_norm2d = torch.nn.InstanceNorm2d(C, affine=False, track_running_stats=False)
instance_norm2d(data_torch)
avg = []
var = []
for channel in range(C):
avg.append(data_np[channel,:,:].mean())
var.append(data_np[channel,:,:].var())
avg = np.array(avg)
var = np.array(var)
avg = avg.repeat(H * W).reshape((C, H, W))
var = var.repeat(H * W).reshape((C, H, W))
(data_np - avg) / np.sqrt(var)
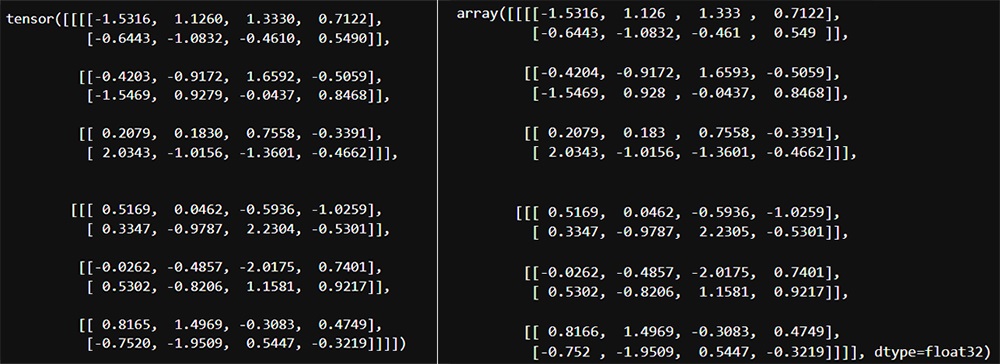
N, C, H, W = (2, 3, 2, 4)
data_np = np.random.randn(N, C, H, W).astype(np.float32)
data_torch = torch.from_numpy(data_np)
instance_norm2d = torch.nn.InstanceNorm2d(C, affine=False, track_running_stats=False)
instance_norm2d(data_torch)
avg = []
var = []
for sample in range(N):
for channel in range(C):
avg.append(data_np[sample,channel,:,:].mean())
var.append(data_np[sample,channel,:,:].var())
avg = np.array(avg)
var = np.array(var)
avg = avg.repeat(H*W).reshape((N, C, H, W))
var = var.repeat(H*W).reshape((N, C, H, W))
(data_np - avg) / np.sqrt(var)
InstanceNorm3d
想必到这里Instance Normalization的计算方法已经十分显然了,就是对每一个样本的每一个通道各自独立计算均值和方差,其中的每个数值使用自己所在通道的统计量进行标准化即可。
InstanceNorm3d输入样板的每个通道大小为 \((D,H,W)\) ,对于 \((C,D,H,W)\) 和 \((N,C,D,H,W)\) ,计算得到的统计量分别有 \(C\) 组、 \(N\times C\) 组
验证如下:
C, D, H, W = (3, 2, 2, 4)
data_np = np.random.randn(C, D, H, W).astype(np.float32)
data_torch = torch.from_numpy(data_np)
instance_norm3d = torch.nn.InstanceNorm3d(C)
instance_norm3d(data_torch)
avg = []
var = []
for channel in range(C):
avg.append(data_np[channel,:,:,:].mean())
var.append(data_np[channel,:,:,:].var())
avg = np.array(avg)
var = np.array(var)
avg = avg.repeat(D*H*W).reshape((C, D, H, W))
var = var.repeat(D*H*W).reshape((C, D, H, W))
(data_np-avg)/np.sqrt(var)
N, C, D, H, W = (2, 3, 2, 2, 4)
data_np = np.random.randn(N, C, D, H, W).astype(np.float32)
data_torch = torch.from_numpy(data_np)
instance_norm3d = torch.nn.InstanceNorm3d(C)
instance_norm3d(data_torch)
avg = []
var = []
for sample in range(N):
for channel in range(C):
avg.append(data_np[sample,channel,:,:].mean())
var.append(data_np[sample,channel,:,:].var())
avg = np.array(avg)
var = np.array(var)
avg = avg.repeat(D*H*W).reshape((N, C, D, H, W))
var = var.repeat(D*H*W).reshape((N, C, D, H, W))
(data_np - avg) / np.sqrt(var)
总结
根据上面的验证可以发现,1d、2d、3d是根据通道的维度来决定的,通道的维度是多少就使用多少的InstanceNorm
第i个样本的第c个通道的统计量计算如下:
事实上,就是固定住样本和通道两个维度,对所有其他维度遍历求值:
- 参与每个统计量计算的数值数量=一个通道中所含数值的数量;
- 统计量的组数=样本数量✖每个样本的通道数量